
About the Team
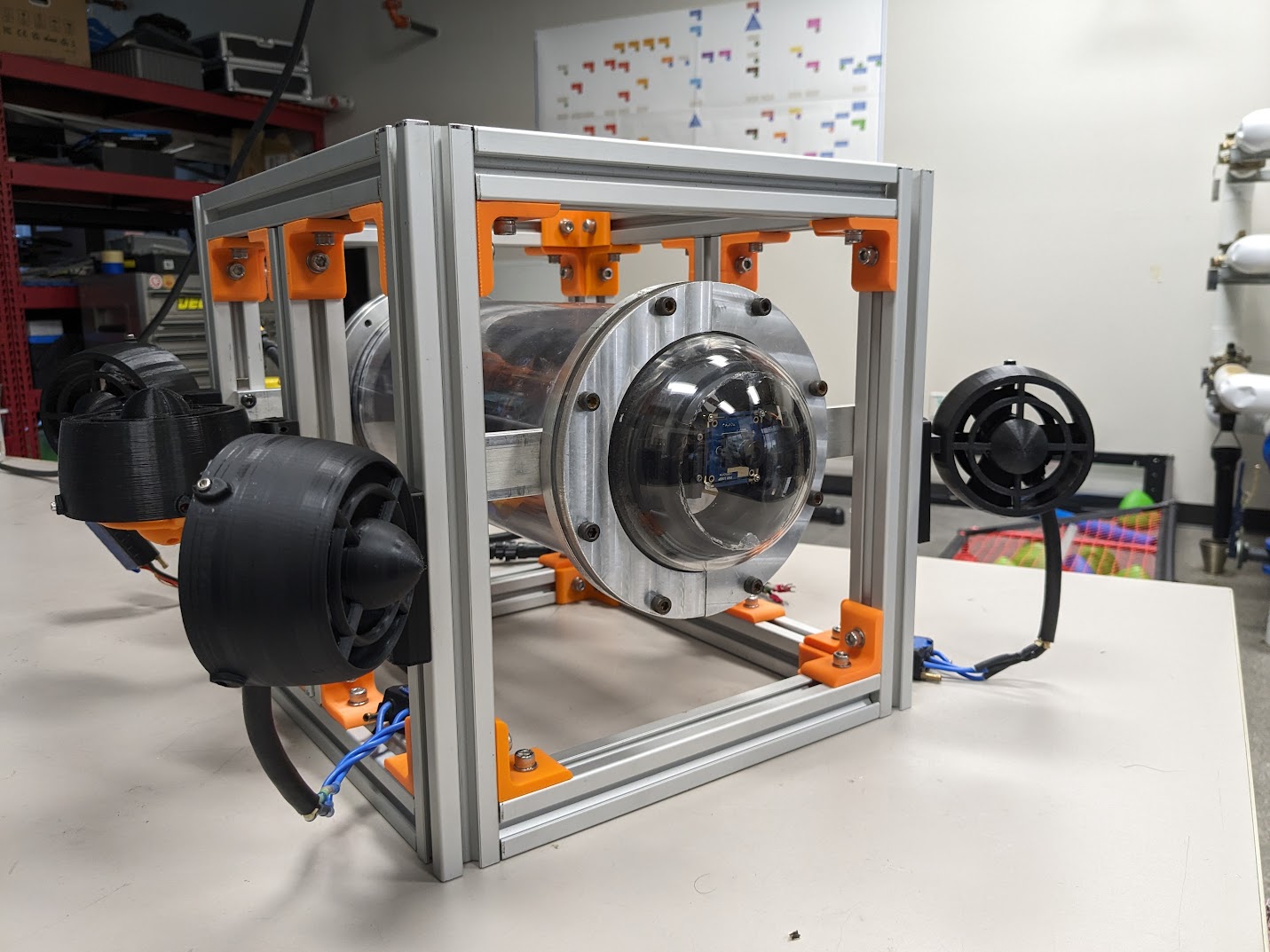
The Underwater Robotics team designs and constructs a Remotely Operated Vehicle (ROV), which is a small submarine. The ROV is made to compete in the Marine Advanced Technology Education (MATE) Competition. Every year, we design components like pneumatic manipulators, pumps, camera systems, and more, depending on what the competition requires. Our team has three subteams, that each work on separate parts of the ROV. Electrical creates the power distribution systems, Computer Science develops control programs and object recognition, and Mechanical designs and tests everything else. We test the ROV in local pools after building a set of the props used in the competition.
